 SMART Scan+
SMART Scan+
 SMART 3D-Scan
SMART 3D-Scan
 SMART Full body
SMART Full body
 SMART Single+
SMART Single+
 SMART Multi-Fiber
SMART Multi-Fiber
 SMART 3D-Fiber
SMART 3D-Fiber
 SMART DAQ
SMART DAQ
 Software SMART Lab
Software SMART Lab
 Scanning Vibrometer
Scanning Vibrometer
 Vector-Series
Vector-Series
 Vector-Micro-Optics
Vector-Micro-Optics
 Nova-Series
Nova-Series
 Nova-Xtra
Nova-Xtra
 Fiber-Series
Fiber-Series
 Fiber-Multiplex
Fiber-Multiplex
 Fiber Micro Manipulator
Fiber Micro Manipulator
 OptoSCAN
OptoSCAN
 OptoGUI
OptoGUI
 단일 지점 진동계
단일 지점 진동계
 레이저 스캐닝 진동계
레이저 스캐닝 진동계
 3D 레이저 진동계
3D 레이저 진동계
 Acoustics & Ultrasonics
Acoustics & Ultrasonics
 Aerospace and aviation
Aerospace and aviation
 자동차
자동차
 생물학 및 의학
생물학 및 의학
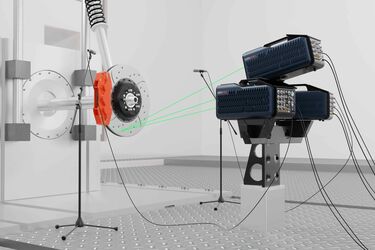
 Brake noise
Brake noise
 Civil Engineering
Civil Engineering
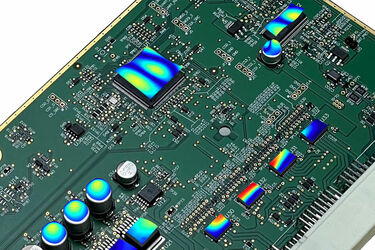
 Electronics & Household Devices
Electronics & Household Devices
 Materials Research
Materials Research
 Medical technology
Medical technology
 Tools & Machinery
Tools & Machinery
 Turbine
Turbine
 Wind tunnel testing
Wind tunnel testing
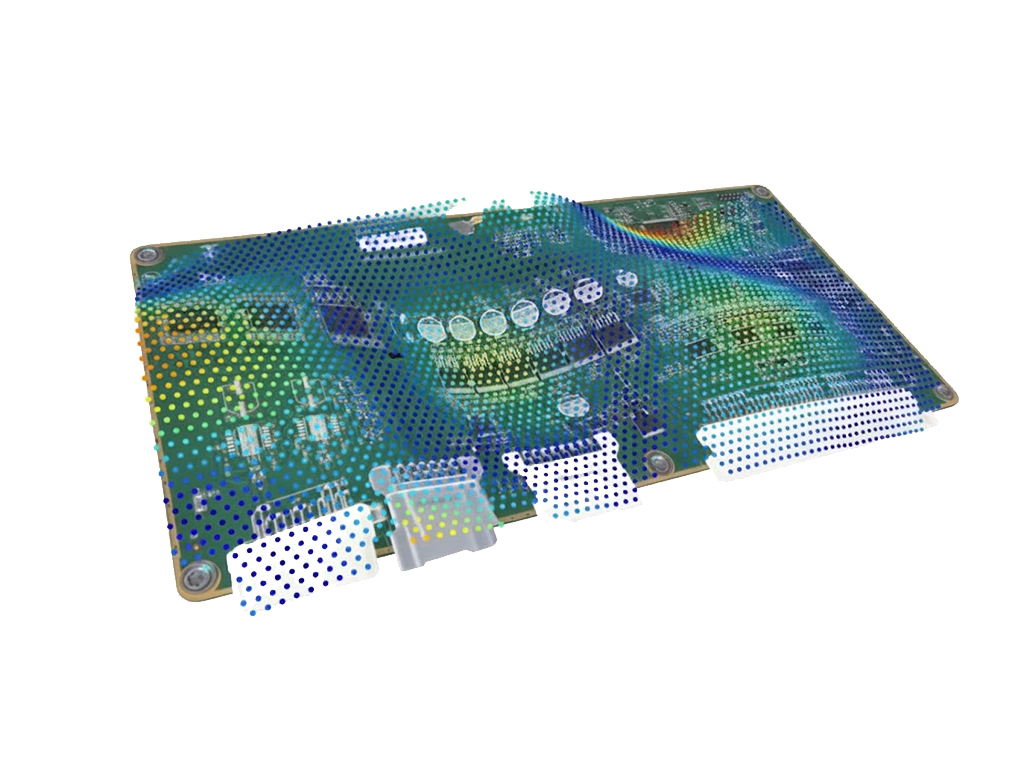
스캐닝 레이저 진동계는 시험 대상의 여러 지점에서 비접촉 방식으로 순차적으로 진동을 측정합니다. 이를 위해 레이저 빔이 정의된 측정 격자를 가로질러 자동으로 안내됩니다. 각 지점에서 속도, 변위 및 가속도가 기록됩니다. 이를 통해 국부 공진에서 전역 모드에 이르기까지 구성 요소의 진동 형상을 완전하게 표현할 수 있습니다.
- Products
- 솔루션
- Applications
- Knowledge
- Optomet
Optomet GmbH
Uhlandstraße 9
64297 Darmstadt
Mail:
sales(at)optomet.de
Phone: +49 6151 38432-0


비교: 스캐닝 진동계 vs. 단일점 진동계
 |  | |
|---|---|---|
| 측정 원리 | 완전한 진동 형상을 생성하기 위해 다수의 측정점이 있는 영역을 자동으로 스캐닝합니다. | 레이저 축을 따라 정의된 한 지점에서 진동을 측정합니다. |
| 위치 지정 | 재위치 지정이 필요 없음 – 레이저 빔은 통합된 편향 거울을 통해 측정 영역을 가로질러 안내됩니다. | 다른 지점을 측정해야 할 때 재위치 지정이 필요합니다. 대안으로 여러 개의 단일점 진동계 또는 광섬유 헤드를 사용할 수 있습니다. |
| 공간 정보 | 시스템 구성에 따라 2D 또는 3D 정보. | 1D 정보(단일 축을 따른 속도, 변위, 가속도). |
| 일반적인 응용 분야 | 전체 영역 진동 해석, 모드 해석 및 복잡한 구조의 조사. | 기계, 공구, 구조물 또는 품질 검사 중인 구성 요소에 대한 단일점 측정. |
레이저 스캐닝 진동계를 이용한 측정 절차
레이저 스캐닝 진동계 측정에서 레이저 빔은 단일 지점을 향하는 것이 아니라 표면의 정의된 여러 위치로 순차적으로 안내됩니다. 움직임으로 인해 발생하는 반사광의 도플러 천이가 통합된 간섭계에서 각 측정점에 대해 평가됩니다. 이를 통해 비접촉 방식으로, 추가 질량 없이, 그리고 정밀한 공간 할당과 함께 속도, 변위 및 가속도의 완전한 데이터 세트가 생성됩니다.
일반적인 측정 절차: 설정에서 평가까지

기존 센서 대비 장점
 |  | |
|---|---|---|
| 측정점 밀도 | 다수의 개별 센서가 필요; 제한된 공간 적용 범위 | 높은 공간 분해능을 위한 수백에서 수천 점의 자동화된 스캐닝 |
| 복잡한 형상 | 접근하기 어려운 영역에서의 제한된 사용성 | 복잡한 구조 및 상세한 모드 형상에 대해서도 측정 가능 |
| 측정 소요 시간 | 다수의 개별 센서로 인한 시간 소모적인 설정 및 긴 측정 시간 | 자동화된 스캐닝 덕분에 일반적으로 약 한 시간 이내에 영역 측정 |
| 표면 준비 | 접착, 나사 고정 또는 기계적 장착이 필요 | 표면 준비가 필요 없음; 완전한 비접촉 방식 |
| 고유 주파수에 대한 영향 | 진동 거동에 영향을 미침 | 진동 거동이 영향을 받지 않음 |
| 측정 가능 주파수 범위 | 일반적으로 수 kHz에서 수십 kHz로 제한됨 | 최대 50 MHz (SMART Series), 최대 25 MHz (CLASSIC Series) |
기준 센서 및 측정점 동기화
레이저 스캐닝 진동계는 구조물을 동시에 측정하는 것이 아니라 여러 개별 지점에서 순차적으로 측정합니다. 이렇게 시간차를 두고 이루어진 측정들을 나중에 깨끗하고 위상이 정확한 진동 형상으로 결합하기 위해서는 시스템에 고정된 기준점이 필요합니다.
이것이 바로 기준 센서의 역할입니다. 기준 센서는 적용된 가진 신호 – 예를 들어 모달 해머의 힘이나 셰이커의 움직임 – 을 기록하고, 모든 측정점에 대한 공통 위상 및 진폭 기준 역할을 합니다.
기준 센서가 항상 필요한가요?
기준 신호가 필요한지 여부는 측정 방법에 따라 달라집니다. 일부 유형의 분석에서는 잘 정의된 기준 신호가 필수적이지만, 다른 분석에서는 가진이 실제 운전 조건에서 발생하여 재현이 불가능하기 때문에 기준 신호가 무의미합니다.
EMA – 실험적 모드 해석
실험적 모드 해석(EMA)에서는 기준 신호가 필요합니다. 가진은 예를 들어 모달 해머, 셰이커 또는 피에조 액추에이터를 사용하여 제어되고 재현 가능한 방식으로 도입됩니다. 기준 신호는 고정된 위상, 시간 및 진폭 기준 역할을 하며 측정점들의 위상 정확한 결합을 가능하게 합니다.
EMA를 통해 가능한 것:
- 정밀한 주파수 응답 함수(FRF)
- 고유 주파수 및 감쇠값의 정확한 결정
- 명확하고 재현 가능한 모드 형상
- 개별 모드의 표적 가진
- 제어되고 반복 가능한 측정 조건
OMA – 운전 모드 해석
운전 모드 해석(OMA)에서는 정의된 가진 기준을 사용할 수 없습니다. 구조물은 예를 들어 바람, 엔진 작동, 교통 하중 또는 공기역학적 영향과 같은 실제 운전 조건에서 가진됩니다. 이러한 가진은 결정론적이거나 재현 가능하지 않기 때문에 가진 기준 채널을 사용할 수 없습니다. 대신 모달 파라미터는 운전 중 측정된 구조 응답으로부터 식별됩니다.
OMA가 적합한 경우:
- 실제 운전 조건에서의 진동 해석
- 인위적으로 가진할 수 없는 대형 구조물
- 제어된 가진 또는 힘 측정이 불가능한 상황
- 운전 중 실제 동적 거동의 분석
기준의 종류
스캐닝 측정에서는 다양한 종류의 기준 센서를 연결할 수 있습니다. 이들은 적용된 가진 또는 그로 인한 움직임을 포착하며 모든 측정점에 대한 공통 기준 역할을 합니다.


Optomet SMART Series: 기준 센서의 간편한 통합
SMART Series 시스템은 추가 하드웨어 없이 기준 센서의 직접 통합을 제공합니다. 센서는 자동으로 감지되며 즉시 측정 워크플로에 통합될 수 있습니다.
장점:
- 가속도 및 힘 센서와 마이크를 직접 연결 가능
- TEDS 및 IEPE 센서 지원
- 모든 채널의 동기 기록
- SMART Lab 소프트웨어에서의 플러그 앤 플레이 통합(신호 즉시 표시)

1D 스캐닝에서 3D 스캐닝으로
모듈식 Optomet SMART Series를 통한 확장 가능성
Optomet SMART Series는 모듈식으로 설계되어 유연하게 확장할 수 있습니다. 처음에 1차원 스캐닝 측정에 사용되던 시스템을 나중에 완전한 3D 스캐닝 진동계로 업그레이드할 수 있습니다. 기존 구성 요소는 시스템의 일부로 유지되며 업그레이드 시 SMART Series의 추가 장치 및 구성 요소로 간단히 보완됩니다.

이 모듈식 접근 방식을 통해 컴팩트한 1D 시스템으로 시작하여 새로운 측정 과제가 발생함에 따라 점진적으로 기능을 확장할 수 있습니다. 이러한 방식으로 시스템은 요구 사항과 함께 성장하며 장기적으로 적응성을 유지합니다.

연구 및 산업 분야의 일반적인 응용
레이저 스캐닝 진동계는 광범위한 응용 분야에서 전체 영역 진동 해석에 사용됩니다. 복잡한 구조의 조사, 모드 형상 및 고유 주파수의 결정, 실제 운전 조건에서의 진동 해석을 가능하게 합니다.
일반적인 응용:
- 모드 해석 – 고유 주파수, 모드 형상 및 감쇠값의 결정
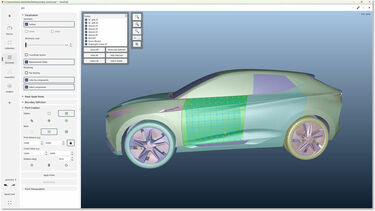
- NVH 조사 – 차량 및 구성 요소의 소음 및 진동 영향 분석
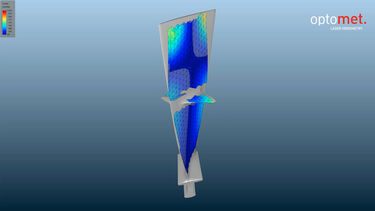
- 항공우주 – 날개, 동체 부분 또는 엔진 구성 요소에 대한 구조 동역학 조사
- 기계 공학 – 기계, 기어박스, 펌프 및 회전 시스템에 대한 진동 해석
- 풍동 – BMW의 새로운 풍동에서 Optomet 레이저 도플러 진동계가 공기역학적 하중 하의 진동을 포착하는 데 사용됩니다.





Optomet의 레이저 스캐닝 진동계
Optomet는 컴팩트한 1D 시스템에서 완전히 통합된 3D 솔루션에 이르기까지 다양한 측정 요구 사항에 맞는 레이저 스캐닝 진동계 제품군을 제공합니다. 이 장치들은 구성, 주파수 범위 및 기능 범위에서 차이가 있습니다.

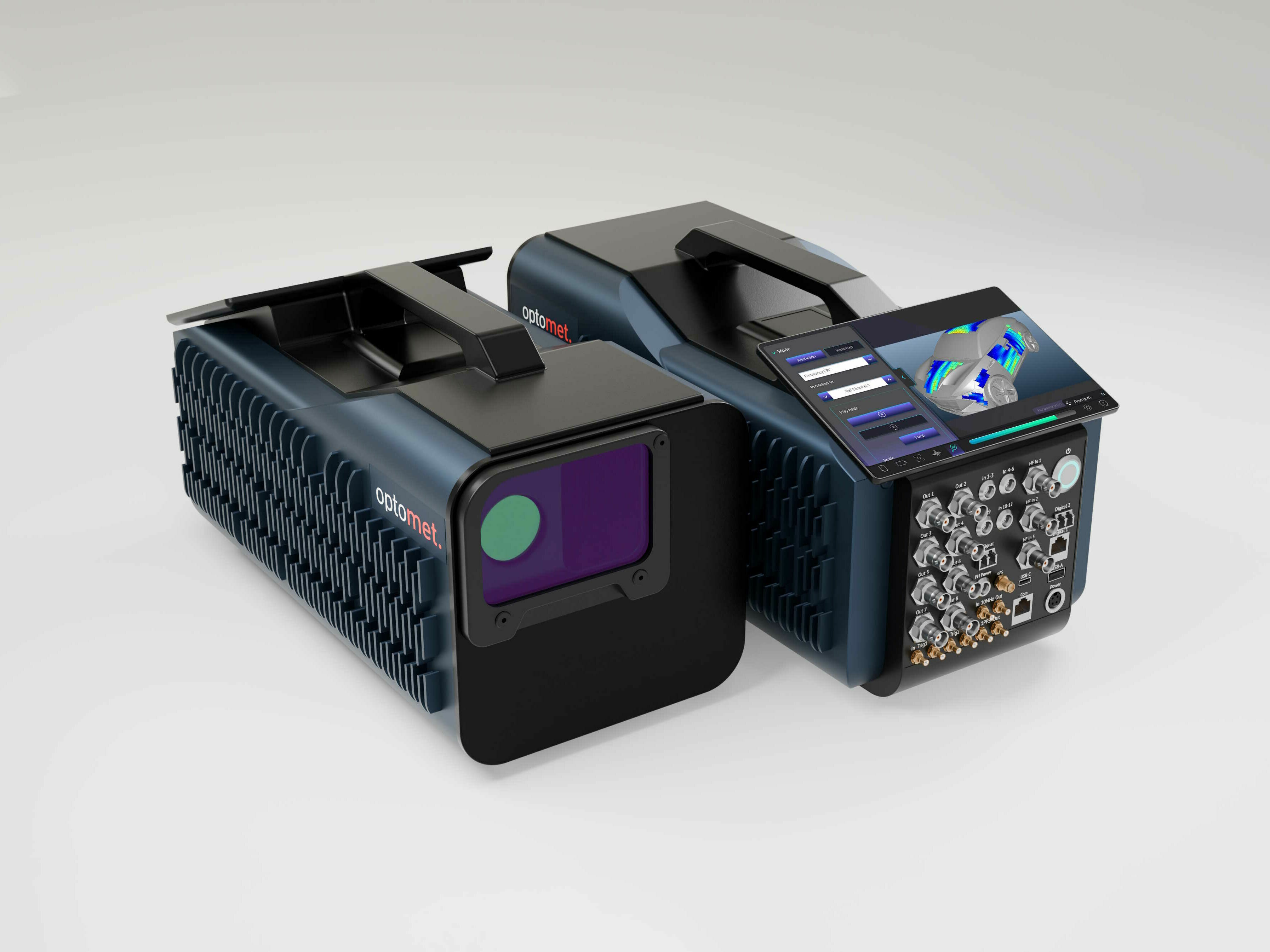
SMART Scan+
SMART Scan+는 전체 영역 진동 측정을 위한 디지털 레이저 스캐닝 진동계입니다. 이 시스템은 통합 카메라와 자동화된 점 스캐닝을 결합하며 모드 해석, NVH 조사 및 구조 동역학 시험에 적합합니다.

SMART 3D-Scan
SMART 3D-Scan 진동계는 스캐닝 방법을 3차원 진동 해석으로 확장합니다.
각 측정점에 대해 세 가지 진동 방향을 모두 동시에 포착합니다: 면내 및 면외 측정을 통해 복잡한 구조에서도 완전한 3D 모드 형상을 구현할 수 있습니다.“

SMART Full Body
SMART Full Body는 여러 대의 SMART Scan+ 진동계를 시험 대상 주위에 배치할 수 있는 유연한 측정 시스템입니다. 이를 통해 대형 구조물을 다양한 시점에서 포착할 수 있습니다. 대안으로 단일 SMART Scan+를 사용할 수 있으며, 이 경우 측정 데이터가 SMART Lab을 사용하여 자동으로 완전한 진동 형상으로 결합됩니다.

스캐닝 진동계(CLASSIC Series)
Classic Scanning Vibrometer는 컴팩트한 스캐닝 시스템입니다. SMART Series와 달리 모듈성이 낮고 완전히 구성된 장치로 사용됩니다. 큰 광학 개구와 통합 비디오 지원을 통해 어둡거나 거친 표면에서, 그리고 더 큰 작동 거리에서도 안정적인 측정이 가능합니다.
SWIR 스캐닝 진동계에 대해 자세히 알아보기 | CLASSIC Scanning Vibrometer 데이터시트(PDF)
검증 프로세스에서의 스캐닝 진동계
FEM 모델의 검증은 시뮬레이션이 구성 요소의 실제 동적 거동을 정확하게 나타내는지 확인하는 핵심 단계입니다. 레이저 스캐닝 진동계는 FEM 결과와 직접 비교할 수 있는 전체 영역 진동 데이터를 제공합니다. 모드 형상, 고유 주파수 및 감쇠값을 점검하고 모델과 실제 간의 편차를 식별합니다.
검증 프로세스에는 무엇보다도 다음 단계가 포함됩니다:
- 시뮬레이션(FEM)과 실제 측정 진동 데이터의 비교
- 모드 형상, 고유 주파수 및 감쇠의 검증
- 경계 조건, 재료 파라미터 및 강성의 조정
- 실제 구성 요소가 시뮬레이션된 거동을 재현하도록 보장
- 모델과 실제 간의 편차 식별 및 평가
이 비교가 중요한 이유는 무엇인가요?
검증된 FEM 모델만이 구조 거동에 대한 신뢰할 수 있는 예측을 가능하게 합니다. 시뮬레이션된 데이터와 측정된 데이터를 비교함으로써 모델 파라미터를 구체적으로 조정하고 최적화할 수 있습니다. 이를 통해 개발 프로세스가 빨라지고 필요한 반복 횟수가 줄어듭니다.
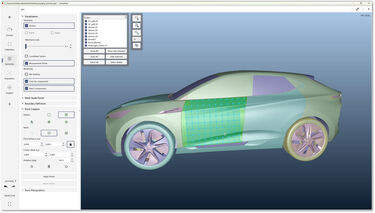
Optomet SMART Lab을 통한 최적의 워크플로
SMART Lab은 전체 검증 프로세스를 지원하며, 시뮬레이션과 측정이 단일한 일관된 좌표계에서 결합됩니다. 3D FEM 모델을 직접 가져올 수 있고, 측정점을 FEM 노드에 자동으로 매핑할 수 있으며, 편차가 즉시 가시화됩니다.
SMART Lab이 제공하는 것:
- 3D FEM 모델(예: NASTRAN)을 소프트웨어로 직접 가져오기
- 스캐닝 점의 자동 할당을 통한 FEM 노드에서의 직접 측정
- 수동 매칭 없이 모든 측정점을 시뮬레이션 노드에 정확하게 배치
- 시뮬레이션 및 실제 측정 데이터를 위한 일관된 좌표계
- 시뮬레이션과 측정 간 편차(모드, 주파수, 감쇠)의 빠른 식별
자동화 및 시험대 환경으로의 통합
레이저 스캐닝 진동계는 기존 시험대, 자동화 환경 또는 측정 체인에 손쉽게 통합될 수 있습니다. 개방형 인터페이스를 통해 모든 측정 데이터를 디지털 및 아날로그 방식으로 모두 사용할 수 있으며 상위 시스템에서 직접 처리할 수 있습니다.
인터페이스 및 통합 옵션:
- 속도, 변위 및 가속도 데이터의 디지털 전송을 위한 Ethernet 인터페이스
- 기존 DAQ 하드웨어로의 직접 통합을 위한 아날로그 출력 채널
- 자동화된 프로세스 및 외부 트리거를 위한 개방형 제어 및 데이터 프로토콜
- 반자동 또는 완전 자동 측정 시스템에서의 유연한 운용
디지털 및 아날로그 인터페이스의 조합 덕분에 진동계는 독립형 측정 시스템으로 작동하거나 완전 자동화된 설정의 일부로 작동할 수 있습니다.
FAQ: 레이저 스캐닝 진동계
이 섹션에서는 측정 소요 시간, 점 밀도, 표면, 기준, 소프트웨어, 레이저 소스, 그리고 기존 측정 및 자동화 환경으로의 통합에 관한 일반적인 질문에 대한 답변을 찾을 수 있습니다.
단일점 진동계는 레이저 축을 따라 단일 지점에서 진동을 측정합니다.
스캐닝 진동계는 레이저를 여러 측정점에 걸쳐 자동으로 안내하고 전체 영역 진동 형상을 생성합니다. 이를 통해 모드 형상, 고유 주파수 및 공간 진동 분포를 시각화할 수 있습니다.
네. 3차원 진동 해석을 위해 Optomet는 3D 스캐닝 유닛으로 함께 작동하는 세 대의 스캐닝 진동계로 구성된 시스템을 사용합니다. 각 진동계는 자체 방향에서 진동을 측정합니다. 세 시스템은 시간 동기화되고, 측정점을 정렬하며, 측정 중 필수 제어 및 기준 신호를 교환합니다.
각 측정점에서 기록된 세 가지 속도 성분으로부터 시스템은 X, Y, Z 방향의 완전한 움직임을 계산합니다. 이를 통해 복잡한 3D 모드 형상과 공간 운동 방향을 정밀하게 표현할 수 있습니다.
Optomet 스캐닝 진동계는 눈에 안전한 레이저 소스로 작동합니다.
보이지 않는 SWIR 측정 레이저(1550 nm)는 레이저 등급 1(< 10 mW)로 분류되며 보안경이 필요하지 않습니다. 일부 시스템은 대안으로 보이는 HeNe 측정 레이저(632.8 nm)로 작동할 수 있으며, 이는 레이저 등급 2(< 1 mW)로 분류되고 마찬가지로 눈에 안전한 것으로 간주됩니다. 정렬을 위해 보이는 파일럿 레이저가 사용되며, 이 역시 레이저 등급 2(< 1 mW)입니다. 모든 레이저는 정상 작동 시 안전하며 각 장치의 기술 데이터시트에 명시되어 있습니다.
응용 분야에 따라 Optomet는 다양한 레이저 소스를 사용합니다. 표준 시스템은 높은 광학 감도를 제공하고 표면 준비가 필요 없는 SWIR 레이저(1550 nm)를 사용합니다. 대안으로 응용 분야에 따라 보이는 HeNe 레이저(632.8 nm)를 사용할 수 있습니다. 레이저 소스는 기술 구성 중에 선택됩니다.
스캐닝 진동계는 항상 개별 점을 순차적으로 측정합니다. 레이저 빔이 정의된 격자를 가로질러 자동으로 이동하며 각 점이 개별적으로 기록됩니다. 기준 신호를 사용하여 시간차가 있는 개별 측정들이 올바른 위상 정렬로 맞춰져 완전한 진동 형상이 만들어집니다.
Full Body Scan의 경우 여러 대의 스캐닝 진동계가 병렬로 작동합니다.
각 장치는 여전히 자체 점을 순차적으로 측정하지만, 대상의 서로 다른 영역을 동시에 다룹니다. SMART Lab에서는 모든 점이 공간적으로 그리고 시간적으로 병합됩니다.
- 단일 스캐닝 진동계: 점이 순차적으로 측정됩니다.
- Full Body Scan(여러 진동계): 여러 개의 순차 스캔이 병렬로 실행되고 동기화됩니다.
가진 방법은 측정 접근 방식과 조사의 목표에 따라 달라집니다. 정의되고 재현 가능한 진동을 위해서는 셰이커, 모달 해머 또는 피에조 액추에이터와 같은 능동 가진원이 일반적으로 사용됩니다. 운전 중 측정에서는 엔진 작동, 바람 또는 공정 힘과 같은 실제 영향에 의해 구조물이 가진될 수 있습니다.
일반적인 가진 방법:
- 임펄스 가진을 위한 모달 해머
- 정의된, 주파수 가변 또는 광대역 가진을 위한 셰이커
- 고주파 또는 국부 가진을 위한 피에조 액추에이터
- 음향 가진을 위한 음장(예: 스피커)
- 하중 하의 거동을 분석하려는 경우의 실제 운전 조건
- 정의되고 통합된 가진원으로서의 내부 신호 발생기(Optomet 스캐닝 진동계 내)
스캐닝 진동계의 경우 소프트웨어 솔루션 SMART Lab과 OptoSCAN이 스캐닝 격자, 장치 제어 및 데이터 분석의 완전한 통합을 제공합니다.
그러나 사용이 필수는 아닙니다: 모든 측정 데이터는 디지털 또는 아날로그 인터페이스를 통해 출력되어 임의의 외부 분석 환경에서 처리될 수도 있습니다.
사용 옵션:
- 완전한 제어, 시각화 및 분석을 위한 SMART Lab / OptoSCAN / OptoGUI
- 개방형 데이터 및 제어 인터페이스를 통한 외부 소프트웨어(예: MATLAB, LabVIEW, Python, FEM 도구 또는 맞춤형 솔루션)
- 직접적인 후속 처리를 위한 아날로그 또는 디지털 원시 데이터 출력(예: 속도, 가속도, 변위)
이를 통해 진동계를 완전히 통합된 측정 솔루션으로 사용하거나, 기존 분석 또는 자동화 시스템 내에서 데이터 소스로 유연하게 사용할 수 있습니다.
스캐닝 진동계는 개방형 인터페이스를 통해 자동화된 시험대 및 기존 측정 체인에 통합될 수 있습니다. 측정 데이터는 디지털 및 아날로그 방식으로 모두 사용할 수 있으며 외부 시스템으로 직접 전송할 수 있습니다.
인터페이스 및 통합:
- 디지털 측정 데이터 및 제어 명령을 위한 Gigabit Ethernet
- 속도, 가속도 또는 변위를 위한 아날로그 출력
- 동기화된 측정 프로세스를 위한 외부 트리거
- 맞춤형 시스템에서의 처리를 위한 개방형 데이터 형식
- 예를 들어 시험대 또는 엔드 오브 라인 응용을 위한 자동화된 시퀀스와의 호환성
이를 통해 진동계를 독립형 측정 시스템으로 사용하거나 완전 자동화된 설정의 일부로 사용할 수 있습니다.
스캐닝 측정의 소요 시간은 원하는 주파수 분해능, 측정점 수, 조사 대상 진동 주파수와 같은 여러 요인에 따라 달라집니다. 빠른 개요를 위해 대상을 초당 최대 50점까지 스캔할 수 있습니다.
필요한 측정점 수는 조사 대상 모드의 공간적 복잡성에 따라 달라집니다. 더 높은 주파수는 더 짧은 파장과 더 많은 절선을 가지므로, 진동 형상을 정확하게 포착하기 위해 더 조밀한 공간 샘플링이 필요합니다.
SMART 스캐닝 진동계는 정의된 측정 영역에 걸쳐 최대 512 × 512 측정점을 기록할 수 있습니다. 이를 통해 복잡한 구조도 완전하게 그리고 고분해능으로 분석할 수 있습니다.
아니요. Optomet 레이저 스캐닝 진동계의 SWIR 레이저는 어둡거나 거친 표면에서도 반사 테이프 없이 신뢰할 수 있는 측정을 가능하게 합니다. 높은 감도와 강한 복귀 신호는 까다로운 조건에서도 안정적이고 높은 신호 대 잡음비를 제공합니다.
스캐닝 진동계는 넓은 범위의 거리에서 사용할 수 있습니다. 설정 및 대상 크기에 따라 다음과 같은 작동 거리가 가능합니다:
- 표준 스캐닝 응용을 위한 최대 100 m 거리 – 대형 구조물 또는 접근하기 어려운 측정 대상에 이상적.
- 매우 작은 대상 또는 미세한 세부를 측정할 때 약 6.5 mm부터의 최소 작동 거리.
이를 통해 시스템은 마이크로미터 범위의 근거리 측정과 산업 환경에서의 원거리 측정을 모두 안정적으로 다룰 수 있습니다.
네. Optomet의 SMART Lab 소프트웨어는 3D 모델의 가져오기를 지원합니다. 사용자는 FEM 지오메트리를 로드하고 측정점을 FEM 노드에 직접 배치할 수 있습니다. 이를 통해 측정 데이터와 시뮬레이션을 정밀하게 비교할 수 있어 FEM 모델의 효율적인 검증 및 최적화가 가능합니다.
Optomet 레이저 스캐닝 진동계는 매우 넓은 크기 범위를 다룹니다:
- 매우 작은 구조 < 1 mm², 예를 들어 MEMS 구성 요소
- 대형 대상 > 10 m², 예를 들어 하우징, 기계 부품 또는 대형 구성 요소
Optomet SMART Series를 사용하면 여러 대의 스캐닝 진동계를 동기적으로 네트워크화할 수 있어 차량 전체 또는 항공기에 대한 측정이 가능합니다(“Full-body vibrometry”).
단일 장치로 DC에서 50 MHz까지의 주파수를 검출할 수 있습니다 – 느린 진동뿐만 아니라 매우 고주파의 동적 프로세스에도 적합합니다.
관련 용어 및 지식
레이저 소스
진동 측정에 사용되는 레이저 유형의 기초 – Helium-Neon, SWIR 및 광섬유 결합 시스템.
레이저 도플러 진동 측정
레이저 도플러 진동 측정의 구조, 작동 원리 및 응용 분야.
진동 측정
연구 및 산업에서의 진동 데이터의 방법, 측정 설정 및 평가.
도플러 효과
레이저 도플러 진동 측정의 물리적 원리 – 정밀한 속도 측정의 기초.
신호 처리
FFT, 주파수 영역 평가 및 실시간 처리를 사용한 진동 데이터 분석.


연구, 개발 및 산업에서의 진동 측정 — Optomet는 귀하의 응용에 적합한 솔루션을 제공합니다.
지금 전화하기
유럽: 9:00am - 5:00pm (UTC+1)
아메리카: 3:00am - 12:00pm (UTC-5)
아시아: 3:00pm - 0:00am (UTC+8)
콜백 요청