 SMART Scan+
SMART Scan+
 SMART 3D-Scan
SMART 3D-Scan
 SMART Full Body
SMART Full Body
 SMART Single+
SMART Single+
 SMART Multi-Fiber
SMART Multi-Fiber
 SMART 3D-Fiber
SMART 3D-Fiber
 SMART DAQ
SMART DAQ
 Software SMART Lab
Software SMART Lab
 Scanning Vibrometer
Scanning Vibrometer
 Vector-Series
Vector-Series
 Vector-Micro-Optics
Vector-Micro-Optics
 Nova-Series
Nova-Series
 Nova-Xtra
Nova-Xtra
 Fiber-Series
Fiber-Series
 Fiber-Multiplex
Fiber-Multiplex
 Fiber Micro Manipulator
Fiber Micro Manipulator
 OptoSCAN
OptoSCAN
 OptoGUI
OptoGUI
 単点式振動計
単点式振動計
 レーザースキャニング振動計
レーザースキャニング振動計
 3D レーザー振動計
3D レーザー振動計
 音響・超音波
音響・超音波
 航空宇宙・航空
航空宇宙・航空
 自動車
自動車
 生物学と医学
生物学と医学
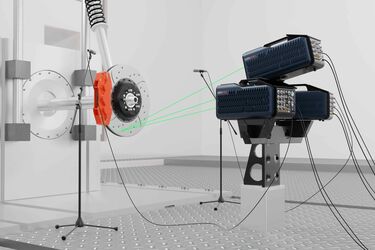
 ブレーキ騒音
ブレーキ騒音
 土木工学
土木工学
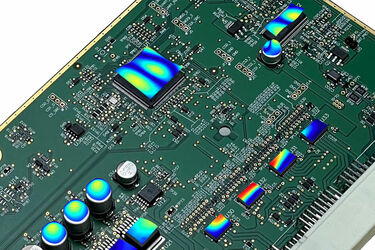
 電子機器・家電
電子機器・家電
 材料研究
材料研究
 医療技術
医療技術
 工具・機械
工具・機械
 タービン
タービン
 風洞試験
風洞試験
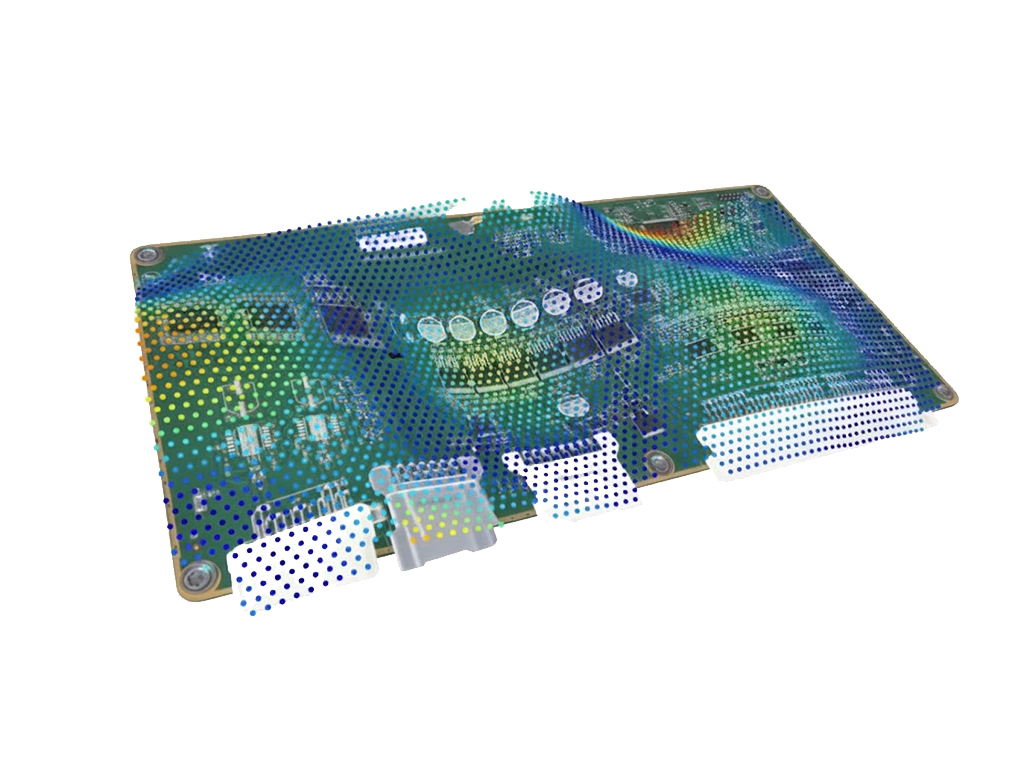
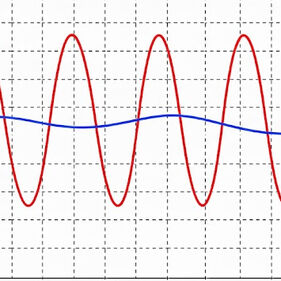
スキャニングレーザー振動計は、被測定物の多数の点で非接触かつ逐次的に振動を測定します。このために、レーザービームは定義された測定格子上を自動的に走査されます。各点で速度、変位、加速度が記録されます。これにより、部品の振動形状の完全な表現が得られます — 局所的な共振からグローバルなモードまで。
- 製品
- ソリューション
- アプリケーション
- ナレッジ
- Optomet
Optomet GmbH
Uhlandstraße 9
64297 Darmstadt
Mail:
sales(at)optomet.de
Phone: +49 6151 38432-0


比較:スキャニング型 対 単一点振動計
 |  | |
|---|---|---|
| 測定原理 | 多数の測定点を持つ領域を自動スキャンし、完全な振動形状を生成します。 | レーザー軸に沿った定義された1点での振動を測定します。 |
| 位置決め | 再位置決めは不要 — レーザービームは内蔵の偏向ミラーを介して測定視野全体に導かれます。 | 別の点を測定する必要がある場合は再位置決めが必要です。あるいは、複数の単一点振動計またはファイバーヘッドを使用することも可能です。 |
| 空間情報 | システム構成に応じて2Dまたは3D情報。 | 1D情報(単一軸に沿った速度、変位、加速度)。 |
| 代表的な用途 | 全視野振動解析、モーダル解析、複雑な構造の調査。 | 機械、工具、構造物、または品質検査における部品の単一点測定。 |
レーザースキャニング振動計を用いた測定の手順
レーザースキャニング振動計の測定では、レーザービームは1点に向けられるのではなく、表面上の多数の定義された位置へ逐次的に導かれます。動きによって生じる反射光のドップラーシフトが、各測定点について内蔵の干渉計で評価されます。これにより、速度、変位、加速度の完全なデータセットが — 非接触で、付加質量なしに、正確な空間的割り当てとともに — 生成されます。
代表的な測定手順:セットアップから評価まで

従来のセンサーに対する利点
 |  | |
|---|---|---|
| 測定点の密度 | 多数の個別センサーが必要。空間的カバレッジが限られる | 数百から数千点の自動スキャンによる高い空間分解能 |
| 複雑なジオメトリ | アクセスが困難な領域での使用に制限がある | 複雑な構造や詳細なモード形状の測定も可能 |
| 測定時間 | 多数の個別センサーによるセットアップと測定に時間がかかる | 自動スキャンにより領域測定は通常約1時間以内 |
| 表面の前処理 | 接着、ねじ止め、または機械的取り付けが必要 | 表面の前処理は不要。完全に非接触 |
| 固有振動数への影響 | 振動挙動に影響を与える | 振動挙動は影響を受けない |
| 測定可能な周波数範囲 | 通常は数 kHz から数十 kHz に制限される | 最大 50 MHz(SMART Series)、最大 25 MHz(CLASSIC Series) |
参照センサーと測定点の同期
レーザースキャニング振動計は、構造を同時にではなく、多数の個別の点で逐次的に測定します。これらの時間的にずれた測定を後でクリーンで位相精度の高い振動形状に統合するために、システムには固定された参照点が必要です。
これがまさに参照センサーの役割です:参照センサーは加えられた励起信号 — 例えばモーダルハンマーの力やシェーカーの動き — を記録し、すべての測定点に共通する位相および振幅の基準として機能します。
参照センサーは常に必要ですか?
参照信号が必要かどうかは測定方法に依存します。一部の解析タイプでは明確に定義された参照信号が不可欠ですが、他のものでは励起が実際の運用条件に由来し再現性がないため、参照信号は無関係です。
EMA — 実験的モーダル解析
実験的モーダル解析(EMA)では、参照信号が必要です。励起は、例えばモーダルハンマー、シェーカー、またはピエゾアクチュエータを用いて、制御された再現可能な方法で導入されます。参照信号は固定された位相、時間、振幅の基準として機能し、測定点の位相精度の高い統合を可能にします。
EMAにより可能になること:
- 精密な周波数応答関数(FRF)
- 固有振動数と減衰値の正確な決定
- 明確で再現可能なモード形状
- 個々のモードの的を絞った励起
- 制御され再現可能な測定条件
OMA — 運用モーダル解析
運用モーダル解析(OMA)では、定義された励起基準が利用できません。構造は実際の運用条件、例えば風、エンジン運転、交通荷重、または空力効果によって励起されます。これらの励起は決定論的でも再現可能でもないため、励起基準チャンネルを使用できません。代わりに、運用中に測定された構造応答からモーダルパラメータが同定されます。
OMAが適している場合:
- 実際の運用条件下での振動解析
- 人工的に励起できない大型構造物
- 制御された励起や力の測定が不可能な状況
- 運用中の実際の動的挙動の解析
参照の種類
スキャニング測定では、さまざまな種類の参照センサーを接続できます。これらは加えられた励起または結果として生じる動きを捉え、すべての測定点に共通の基準として機能します。


Optomet SMART Series:参照センサーの容易な統合
SMART Seriesのシステムは、追加のハードウェアなしに参照センサーを直接統合できます。センサーは自動的に検出され、すぐに測定ワークフローに組み込むことができます。
利点:
- 加速度センサーや力センサー、マイクロフォンを直接接続可能
- TEDSおよびIEPEセンサーのサポート
- すべてのチャンネルの同期ロギング
- SMART Labソフトウェアでのプラグアンドプレイ統合(信号がすぐに表示される)

1Dスキャニングから3Dスキャニングへ
モジュラー式のOptomet SMART Seriesによる拡張性
Optomet SMART Seriesはモジュラー設計であり、柔軟に拡張できます。当初は一次元のスキャニング測定に使用されていたシステムを、後にフル3Dスキャニング振動計にアップグレードできます。既存のコンポーネントはシステムの一部として残り、アップグレード時にはSMART Seriesの追加デバイスやコンポーネントで補完されるだけです。

このモジュラーアプローチにより、コンパクトな1Dシステムから始め、新しい測定タスクが生じるにつれて機能を段階的に拡張することが可能になります。このようにして、システムは要件とともに成長し、長期的に適応可能であり続けます。

研究および産業における代表的な用途
レーザースキャニング振動計は、幅広い用途にわたる全視野振動解析に使用されます。複雑な構造の調査、モード形状と固有振動数の決定、実際の運用条件下での振動解析を可能にします。
代表的な用途:
- モーダル解析 — 固有振動数、モード形状、減衰値の決定
- NVH調査 — 車両や部品における騒音および振動効果の解析
- 航空宇宙 — 翼、胴体部、エンジン部品の構造動力学的調査
- 機械工学 — 機械、ギアボックス、ポンプ、回転システムの振動解析
- 風洞 — BMWの新しい風洞では、空力荷重下での振動を捉えるためにOptometのレーザードップラー振動計が使用されています。





Optometのレーザースキャニング振動計
Optometは、さまざまな測定要件に対応するレーザースキャニング振動計のラインアップを提供しています — コンパクトな1Dシステムから完全統合型の3Dソリューションまで。これらのデバイスは、構成、周波数範囲、および機能範囲が異なります。

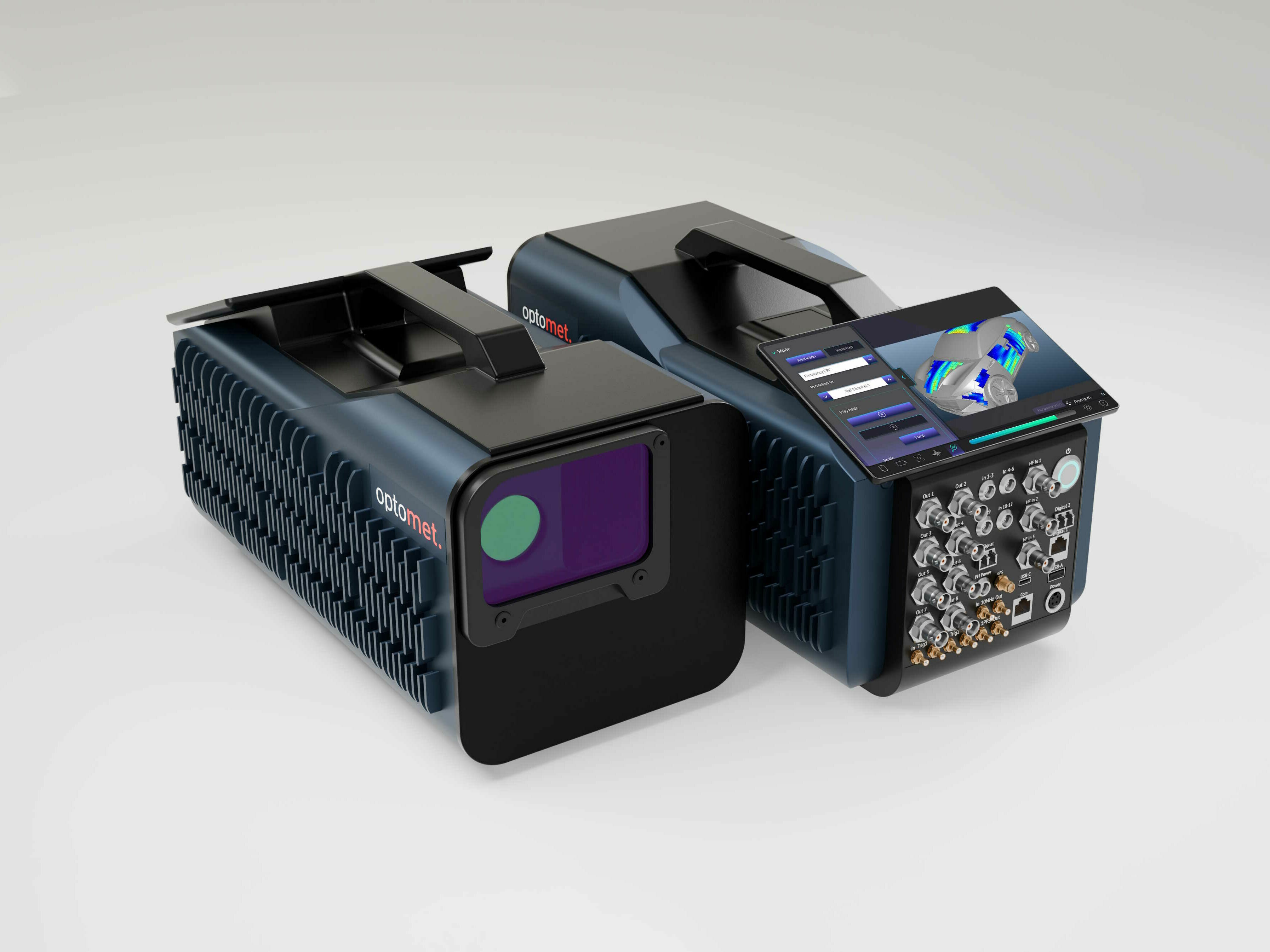
SMART Scan+
SMART Scan+は、全視野振動測定用のデジタルレーザースキャニング振動計です。このシステムは内蔵カメラと自動点スキャンを組み合わせており、モーダル解析、NVH調査、構造動力学試験に適しています。

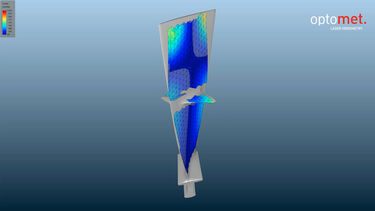
SMART 3D-Scan
SMART 3D-Scan振動計は、スキャニング手法を三次元振動解析にまで拡張します。
各測定点について3つの振動方向すべてを同時に捉えます:面内および面外測定により、複雑な構造でも完全な3Dモード形状が可能になります。」

SMART Full Body
SMART Full Bodyは、複数のSMART Scan+振動計を被測定物の周囲に配置できる柔軟な測定システムです。これにより、大型構造物をさまざまな視点から捉えることが可能になります。あるいは、単一のSMART Scan+を使用し、測定データをSMART Labを用いて自動的に完全な振動形状に統合することもできます。

スキャニング振動計(CLASSIC Series)
Classic Scanning Vibrometerはコンパクトなスキャニングシステムです。SMART Seriesとは対照的に、モジュラー性は低く、完全に構成済みのデバイスとして使用されます。大きな光学開口と内蔵のビデオサポートにより、暗いまたは粗い表面でも、また大きな作動距離でも安定した測定が可能です。
SWIRスキャニング振動計の詳細はこちら | データシート CLASSIC Scanning Vibrometer(PDF)
検証プロセスにおけるスキャニング振動計
FEMモデルの検証は、シミュレーションが部品の実際の動的挙動を正確に表現していることを確認するための重要なステップです。レーザースキャニング振動計は、FEM結果と直接比較できる全視野振動データを提供します。モード形状、固有振動数、減衰値が確認され、モデルと現実の間のずれが特定されます。
検証プロセスには、とりわけ以下のステップが含まれます:
- シミュレーション(FEM)と実際に測定された振動データの比較
- モード形状、固有振動数、減衰の検証
- 境界条件、材料パラメータ、剛性の調整
- 実際の部品がシミュレートされた挙動を再現することの確認
- モデルと現実の間のずれの特定と評価
なぜこの比較が重要なのですか?
検証されたFEMモデルのみが、構造挙動の信頼性の高い予測を可能にします。シミュレーションデータと測定データを比較することで、モデルパラメータを的確に調整し最適化できます。これにより開発プロセスが加速し、必要な反復回数が削減されます。
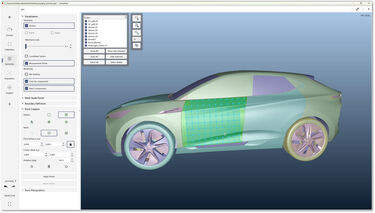
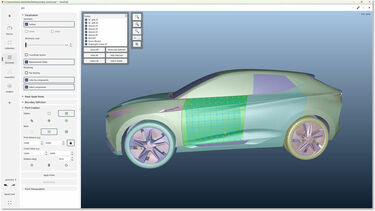
Optomet SMART Labによる最適なワークフロー
SMART Labは検証プロセス全体をサポートします。シミュレーションと測定が単一の一貫した座標系で組み合わされるためです。3D FEMモデルを直接インポートでき、測定点をFEMノードに自動的にマッピングでき、ずれが即座に可視化されます。
SMART Labが提供するもの:
- 3D FEMモデル(例:NASTRAN)をソフトウェアに直接インポート
- スキャニング点の自動割り当てによるFEMノード上での直接測定
- 手動マッチングなしですべての測定点をシミュレーションノード上に正確に配置
- シミュレーションと実測定データのための一貫した座標系
- シミュレーションと測定の間のずれ(モード、周波数、減衰)の迅速な特定
自動化およびテストベンチ環境への統合
レーザースキャニング振動計は、既存のテストスタンド、自動化環境、または測定チェーンに容易に統合できます。オープンインターフェースを通じて、すべての測定データはデジタルおよびアナログの両方で利用でき、上位システムによって直接処理できます。
インターフェースと統合オプション:
- 速度、変位、加速度データのデジタル伝送のためのEthernetインターフェース
- 既存のDAQハードウェアへの直接統合のためのアナログ出力チャンネル
- 自動化プロセスと外部トリガーのためのオープンな制御およびデータプロトコル
- 半自動または全自動測定システムでの柔軟な運用
デジタルとアナログのインターフェースの組み合わせにより、振動計はスタンドアロンの測定システムとして、または全自動セットアップの一部として運用できます。
FAQ:レーザースキャニング振動計
このセクションでは、測定時間、点密度、表面、参照、ソフトウェア、レーザー光源、および既存の測定・自動化環境への統合に関する一般的な質問への回答を見つけることができます。
単一点振動計は、レーザー軸に沿った単一点での振動を測定します。
スキャニング振動計は、レーザーを多数の測定点にわたって自動的に導き、全視野の振動形状を生成します。これにより、モード形状、固有振動数、空間的な振動分布を可視化できます。
はい。三次元振動解析のために、Optometは3Dスキャニングユニットとして連携して動作する3台のスキャニング振動計からなるシステムを使用します。各振動計は独自の方向から振動を測定します。3台のシステムは時間同期され、測定点を整列させ、測定中に必須の制御信号と参照信号を交換します。
各測定点で記録された3つの速度成分から、システムはX、Y、Z方向の完全な動きを計算します。これにより、複雑な3Dモード形状と空間的な動きの方向を正確に表現できます。
Optometのスキャニング振動計は、アイセーフなレーザー光源で動作します。
不可視のSWIR測定レーザー(1550 nm)はレーザークラス1(< 10 mW)に分類され、保護メガネを必要としません。一部のシステムは、代わりに可視のHeNe測定レーザー(632.8 nm)で動作させることができ、これはレーザークラス2(< 1 mW)に分類され、同じくアイセーフと見なされます。位置合わせには可視のパイロットレーザーが使用され、これもレーザークラス2(< 1 mW)です。すべてのレーザーは通常運用時に安全であり、各デバイスの技術データシートに明記されています。
用途に応じて、Optometは異なるレーザー光源を使用します。標準システムはSWIRレーザー(1550 nm)を使用し、高い光学的感度を提供し、表面の前処理を必要としません。あるいは、用途分野に応じて可視HeNeレーザー(632.8 nm)が使用される場合もあります。レーザー光源は技術的な構成の際に選択されます。
スキャニング振動計は、個々の点を常に逐次的に測定します。レーザービームは定義された格子上を自動的に移動し、各点が個別に記録されます。参照信号を用いて、時間的にずれた個別の測定が正しい位相整合に持ち込まれ、完全な振動形状が得られます。
Full Body Scanでは、複数のスキャニング振動計が並行して動作します。
各デバイスは依然として自身の点を逐次的に測定しますが、物体の異なる領域を同時にカバーします。SMART Labでは、すべての点が空間的および時間的に統合されます。
- 単一のスキャニング振動計:点は逐次的に測定されます。
- Full Body Scan(複数の振動計):複数の逐次スキャンが並行して実行され、同期されます。
励起方法は、測定アプローチと調査の目的に依存します。定義された再現可能な振動には、シェーカー、モーダルハンマー、ピエゾアクチュエータなどの能動的な励起源が一般的に使用されます。運用測定では、構造はエンジン運転、風、またはプロセス力などの実際の影響によって励起されることがあります。
代表的な励起方法:
- インパルス励起のためのモーダルハンマー
- 定義された、周波数可変の、または広帯域の励起のためのシェーカー
- 高周波または局所的な励起のためのピエゾアクチュエータ
- 音響励起のための音場(例:ラウドスピーカー)
- 荷重下での挙動を解析する場合の実際の運用条件
- 定義された統合励起源としての内蔵信号発生器(Optometスキャニング振動計内)
スキャニング振動計には、ソフトウェアソリューションのSMART LabとOptoSCANが、スキャニング格子、デバイス制御、データ解析の完全な統合を提供します。
ただし、それらの使用は必須ではありません:すべての測定データはデジタルまたはアナログのインターフェースを介して出力でき、任意の外部解析環境で処理できます。
使用オプション:
- 完全な制御、可視化、解析のためのSMART Lab / OptoSCAN / OptoGUI
- オープンなデータおよび制御インターフェースを介した外部ソフトウェア(例:MATLAB、LabVIEW、Python、FEMツール、またはカスタムソリューション)
- 直接的な下流処理のためのアナログまたはデジタルの生データ出力(例:速度、加速度、変位)
これにより、振動計は完全統合型の測定ソリューションとして、また既存の解析または自動化システム内のデータソースとして柔軟に使用できます。
スキャニング振動計は、オープンインターフェースを通じて自動化されたテストスタンドや既存の測定チェーンに統合できます。測定データはデジタルおよびアナログの両方で利用でき、外部システムに直接転送できます。
インターフェースと統合:
- デジタル測定データと制御コマンドのためのギガビットEthernet
- 速度、加速度、または変位のためのアナログ出力
- 同期された測定プロセスのための外部トリガー
- カスタムシステムでの処理のためのオープンなデータ形式
- 例えばテストベンチやエンドオブライン用途のための自動化シーケンスとの互換性
これにより、振動計はスタンドアロンの測定システムとして、または全自動セットアップの一部として使用できます。
スキャニング測定の所要時間は、希望する周波数分解能、測定点の数、調査対象の振動周波数など、いくつかの要因に依存します。簡単な概要を得るには、物体を毎秒最大50点でスキャンできます。
必要な測定点の数は、調査対象のモードの空間的複雑さに依存します。高い周波数は波長が短くノードラインが多いため、振動形状を正確に捉えるにはより密な空間サンプリングが必要です。
SMARTスキャニング振動計は、定義された測定領域全体で最大512 × 512の測定点を記録できます。これにより、複雑な構造でも完全かつ高分解能で解析できます。
いいえ。Optometのレーザースキャニング振動計のSWIRレーザーは、暗いまたは粗い表面でもリフレクターテープなしで信頼性の高い測定を可能にします。高い感度と強い戻り信号により、困難な条件下でも安定した高いS/N比が得られます。
スキャニング振動計は、幅広い距離範囲にわたって使用できます。セットアップと物体サイズに応じて、以下の作動距離が可能です:
- 標準的なスキャニング用途では最大 100 m の距離 — 大型構造物やアクセスが困難な測定対象物に最適です。
- 非常に小さな物体や細部を測定する場合、最小作動距離は約 6.5 mm から。
これにより、システムはマイクロメートル範囲での近距離測定と産業環境での遠距離測定の両方を確実にカバーできます。
はい。OptometのSMART Labソフトウェアは3Dモデルのインポートをサポートしています。ユーザーはFEMジオメトリを読み込み、測定点をFEMノード上に直接配置できます。これにより、測定データとシミュレーションを精密に比較でき、FEMモデルの効率的な検証と最適化が可能になります。
Optometのレーザースキャニング振動計は、非常に広いサイズ範囲をカバーします:
- 例えばMEMS部品など、< 1 mm² の非常に小さな構造
- 筐体、機械部品、または大型部品など、> 10 m² の大型物体
Optomet SMART Seriesでは、複数のスキャニング振動計を同期してネットワーク接続でき、車両全体や航空機全体での測定(「フルボディ振動計測」)が可能になります。
単一のデバイスで、DC から 50 MHz までの周波数を検出できます — 遅い振動から非常に高周波の動的プロセスまで適しています。
関連用語と知識
レーザー光源
振動計測に使用されるレーザータイプの基礎 — ヘリウムネオン、SWIR、ファイバー結合システム。
レーザードップラー振動計測
レーザードップラー振動計測の構造、動作原理、応用分野。
振動測定
研究および産業における振動データの方法、測定セットアップ、評価。
ドップラー効果
レーザードップラー振動計測の物理的原理 — 精密な速度測定の基礎。
信号処理
FFT、周波数領域評価、リアルタイム処理を用いた振動データの解析。
ダウンロード


研究、開発、産業における振動測定 — Optometはお客様の用途に最適なソリューションを提供します。
今すぐ電話
ヨーロッパ: 9:00am - 5:00pm (UTC+1)
南北アメリカ: 3:00am - 12:00pm (UTC-5)
アジア: 3:00pm - 0:00am (UTC+8)
折り返し電話